- Datum : Dezember 2019
- Auftraggeber : bib College International
- Produktions-Ort : Bergisch Gladbach
- Projekt-Status : beendet
Eine fiktive Firma stellt verschiedene Promotionartikel her. Kunden können diese personalisieren, indem sie das eigene Firmenlogo auf die Objekte aufbringen lassen (z.B. drucken oder prägen). Um den Kunden dies ohne großen Aufwand demonstrieren zu können, soll das Logo des jeweiligen Kunden schnell und einfach auf den Promotionartikeln der Firma angezeigt werden können. Für einen fiktiven Messauftritt der Firma auf einer Spielemesse soll dies am Beispiel eines passenden Objekts gezeigt werden: einem kleinen Roboter. Die angebotenen Roboter können das Logo außerdem projizieren. Der Roboter und ein zweites passendes Objekt (Behausung, Garage oder Gefährt) sollte als 3D-Modell realistisch und detailliert erstellt werden. Am Ende sollten verschiedene Varianten von Logo-Auftragungen dargestellt werden.
Vorgang
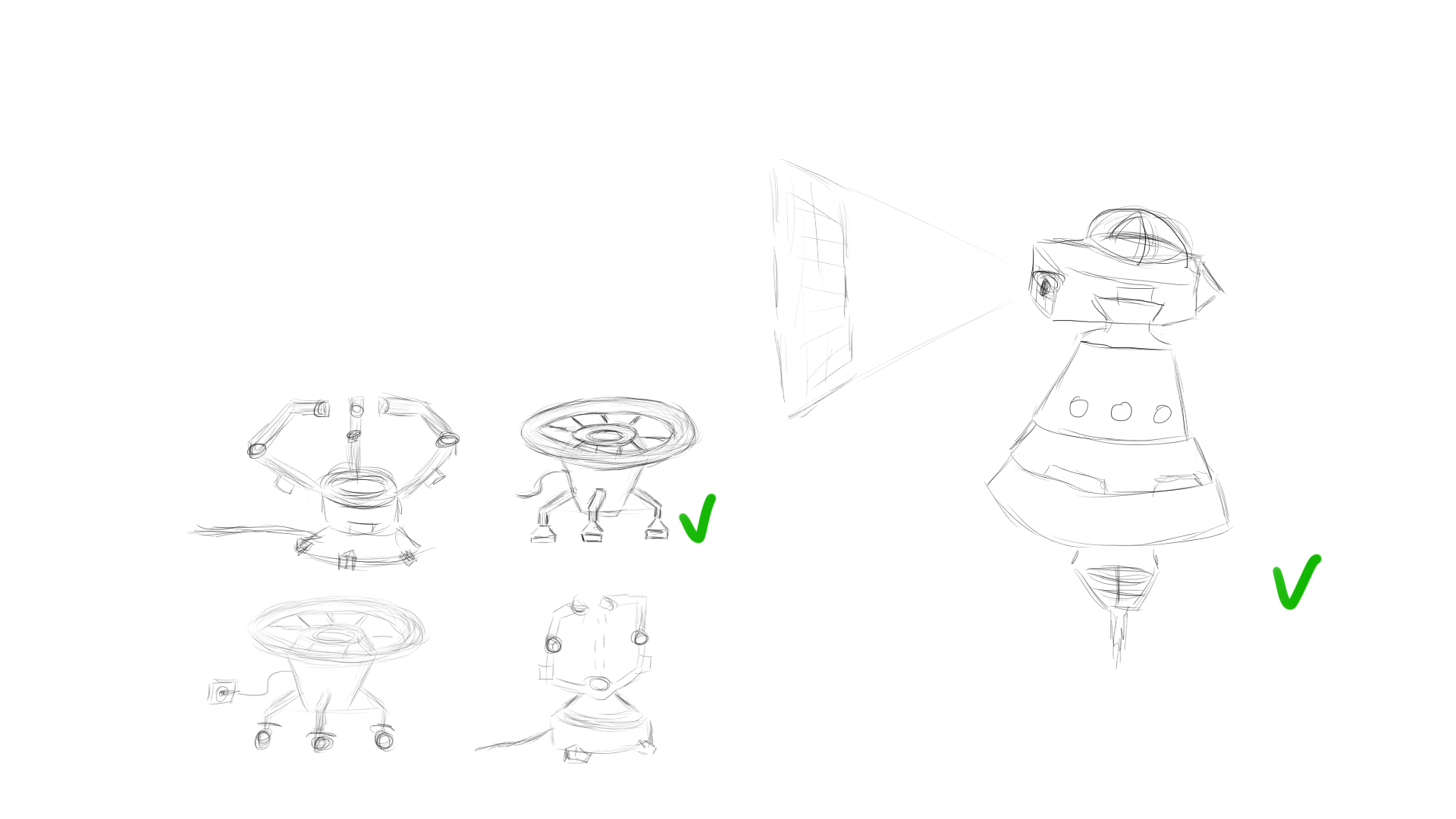
Zu Beginn wurden verschiedene Referenzbilder von Roboter und deren Details im Internet gesucht und zusammengetragen. Als Zusatz-Objekt entschied ich mich für eine Ladestation. Ich zeichnete Skizzen meiner Ideen und wählte jeweils ein Design aus. Das Konzept hielt ich zudem schriftlich in der Projekt-Dokumentation fest.
Nun konnte ich einen Zeitplan festlegen. Für das ganze Projekt hatten wir nur eine komplette Woche Zeit. Alle weiteren Arbeitsschritte mit Tag und Zeitspanne wurden wieder in der Projekt-Dokumentation festgehalten.
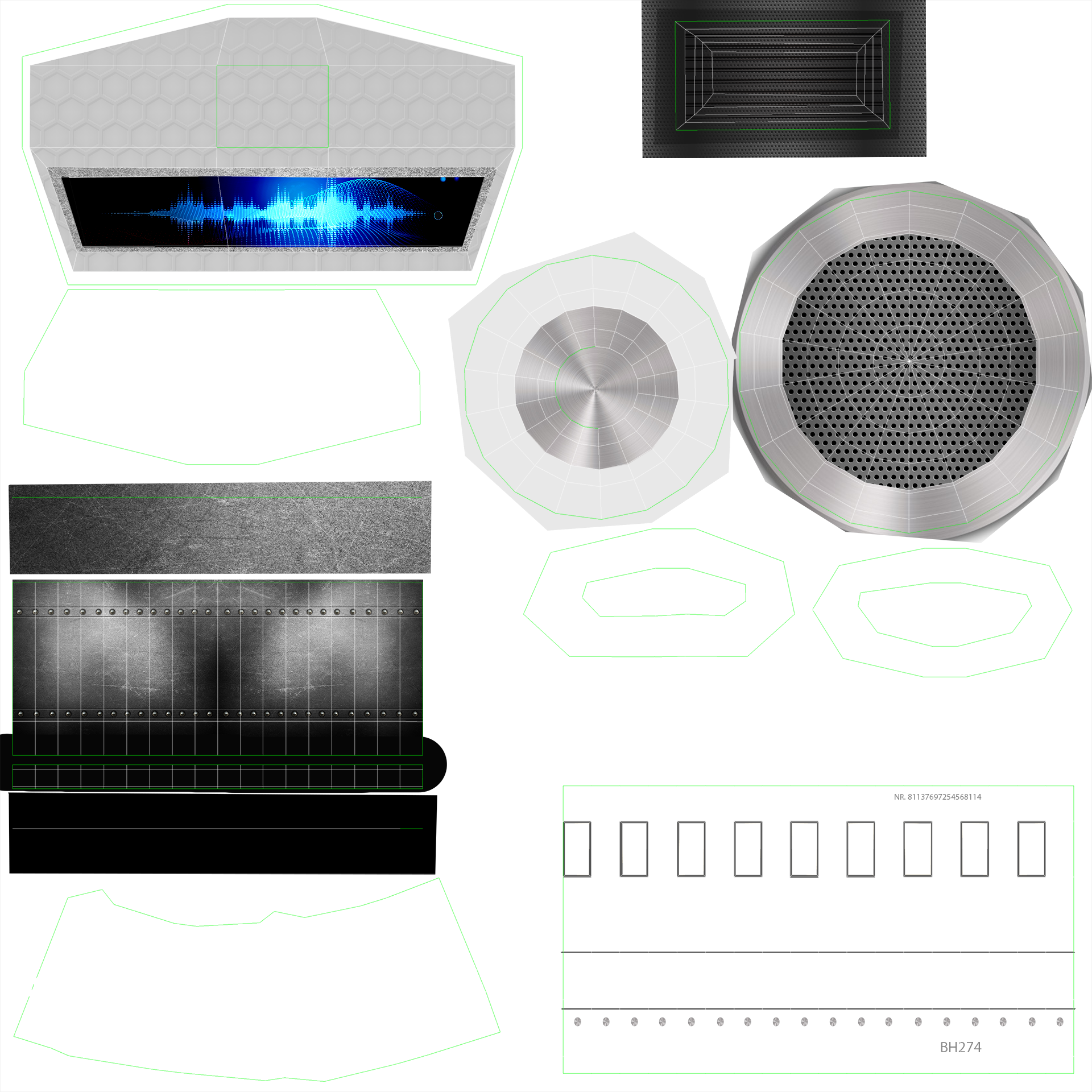
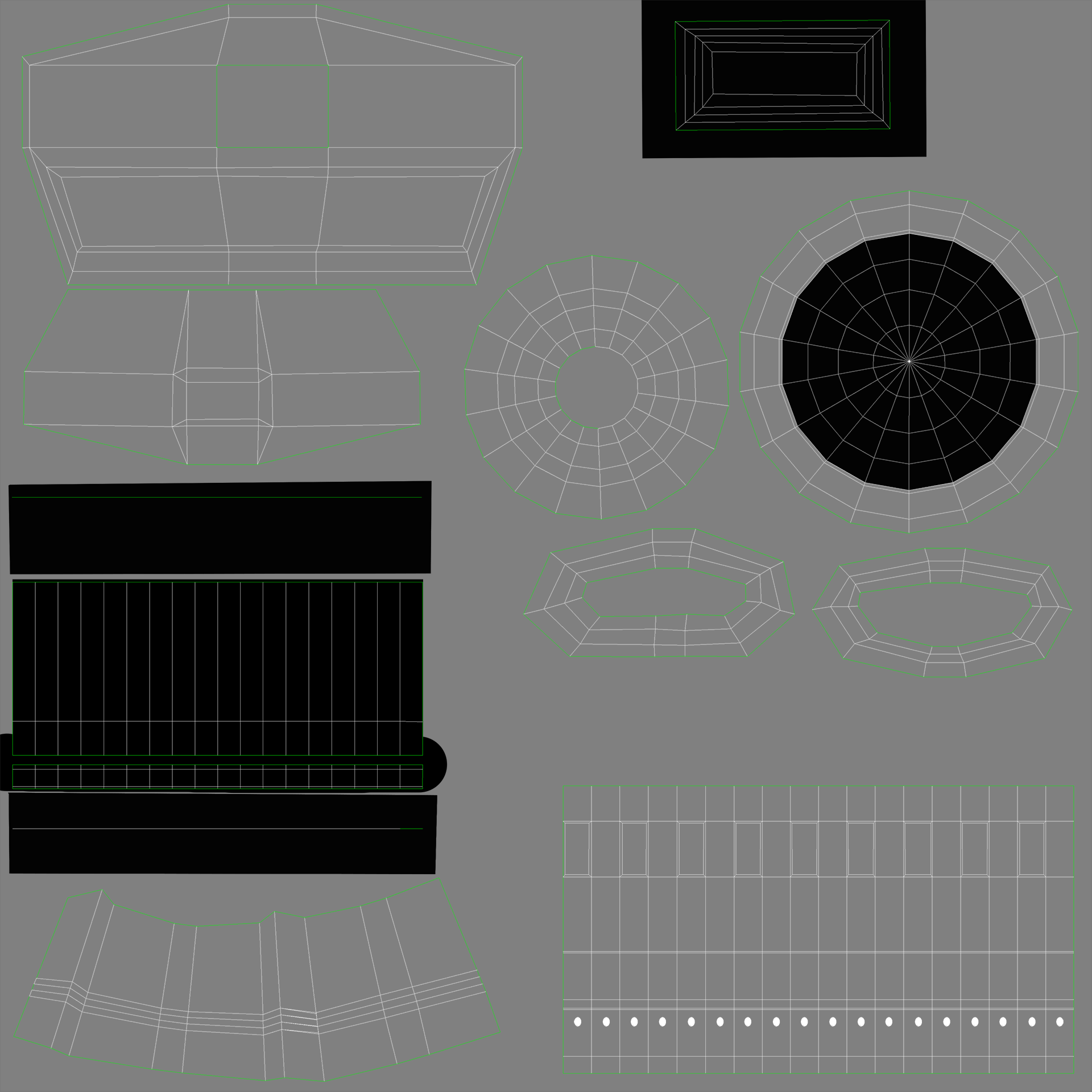
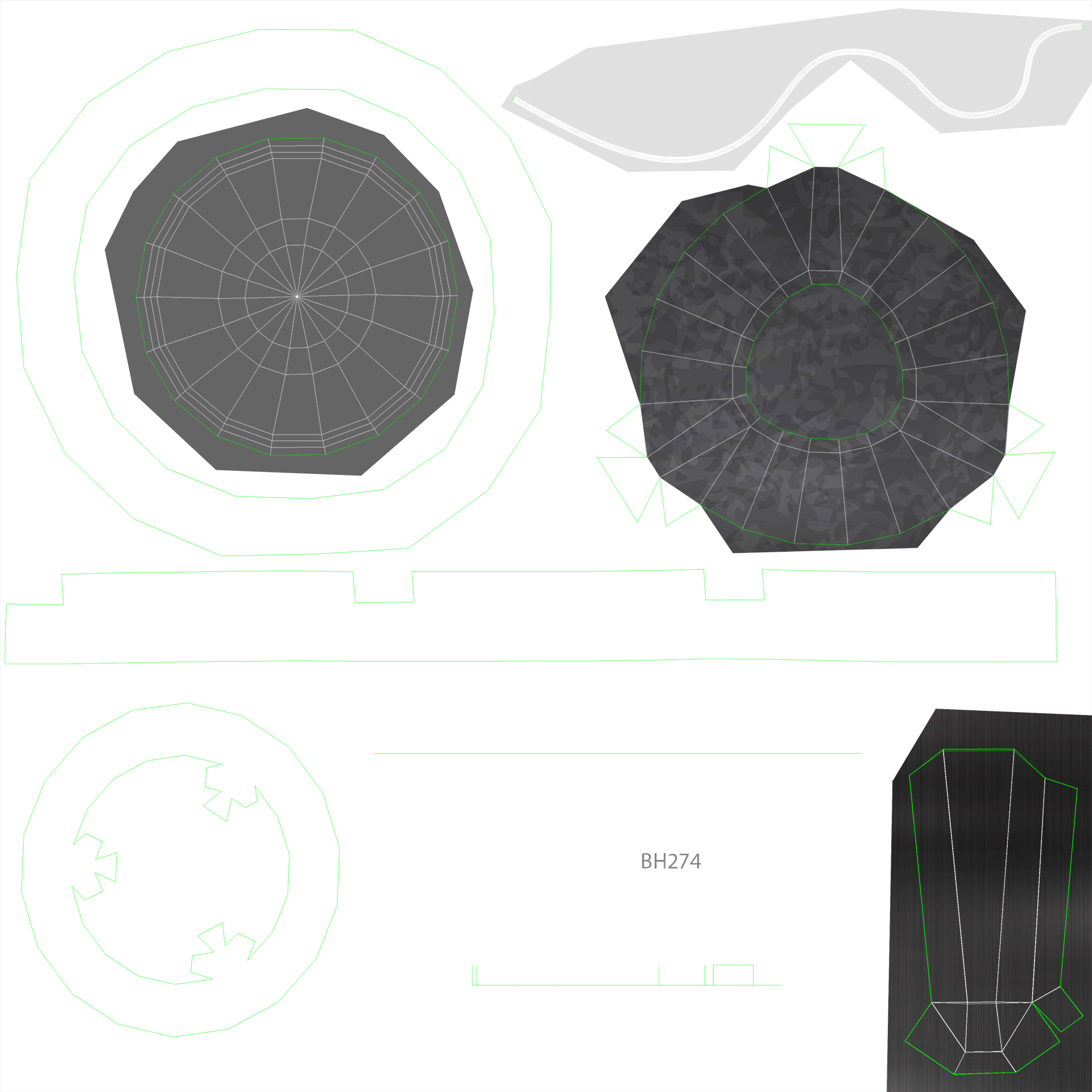
Ich entwarf im nächsten Arbeitsschritt den Roboter und die Ladestation in 3ds Max. Angefangen mit groben Formen wurden diese immer weiter ausgearbeitet. Um den Objekten ein möglichst realistisches Aussehen zu verleihen, wurde auf harte Kanten verzichtet und Flächen eher abgerundet, ohne dabei die Polygon-Anzahl zu sehr anzuheben. Als die Objekte fertig waren und alle Polygon-Fehler behoben wurden, erstellte ich die UVW-Maps, für die spätere Texturierung. Als Referenz-Hintergrund wurde bereits im 3D-Programm die Foto-Vorlage unseres Dozenten eingebunden. Dieses Foto wurde auch später in der finalen Bildmontage verwendet. Folglich konnten die 3D-Szenen entsprechend dem Hintergrund in Sachen Kamera-Perspektive und Beleuchtung / Schatten angepasst werden. Anschließend wurden die einzelnen Texturen-Maps in Photoshop designt und regelmäßig in der 3D-Szene getestet. Die „Diffuse-Map“ definiert dabei die Oberflächen-Textur, während die „Bump-Map“ eine Tiefe in der Oberflächenbeschaffenheit darstellt und die „Specular-Map“ die Licht-Reflextion vorgibt. Hierfür wurden einzelne Oberflächen-Grafiken aus geeigneten Quellen im Internet verwendet. Für alle Materialien habe ich natürlich die Nutzungsrechte.
Zum Schluss renderte ich alle 3D-Szenen ohne Hintergrund in hoher Qualität und platzierte sie in der bestehenden Photoshop-Vorlage unseres Dozenten. In dieser befindet sich auch bereits das Schreibtisch-Foto für den Hintergrund in Original-Qualität. In die Haupt-Szene wurde das rote Laser-Licht für die Projektion, sowie Feuer- und Rauch-Effekte für die Düse montiert und drei Logos realistisch anmutend eingebaut. Die vier weiteren Nahaufnahmen bekamen abschließend differenzierte Logo-Aufträge: schwarze Prägung, farbige Stanzung, Silber-Lackierung und einen blauen Logo-Aufkleber. Alle Logos wurden nach der „Mockup“ – Technik eingebunden und können jederzeit problemlos ausgetauscht werden.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}